Directional transportation of objects (liquids and solids) has crucial applications from energy transfer, intelligent robots to biomedical devices, which has become a frontier for research. In the past 20 years, although great breakthroughs in liquid migration have been reached, there are few scientific research reports focusing on solid transportation cases within cavity environments under high pressure, where interface friction and elastic deformation often coexist and affect each other. Different from the liquid directional transportation mechanism (capillary driving force induced by the micro-structure or interface chemical gradient), realizing directional solid transportation under a confined pressure environment requires a strong mechanical driving force to overcome the rising interface friction force in the elastic deformation-contact process, and the favourable interface lubrication is a prerequisite.
Prof. ZHOU Feng’s research group from the State Key Laboratory of Solid Lubrication, Lanzhou Institute of Chemical Physics, Chinese Academy of Sciences, proposed a novel strategy to solve the aforementioned problem. In nature, solid foods with a large volume size can smoothly pass through the esophagus into the stomach, which can be attributed to the synergy of mechanical actuation (muscle peristaltic contractions) and surface lubrication (mucus secreted by the esophageal mucosa). Inspired by this, the researchers designed an intelligent hydrogel-based tubular soft material actuator based on the coupling effect of interface lubrication and mechanical deformation. Aided by a robust inner surface lubricating layer of the hydrogel tube, the fluid dynamic pressure and mechanical driving force generated by the contraction and deformation of the tube cavity are applied to realize on-demand transportation of solids in multiple directions. Related research results were published in Advanced Science.
Specifically, based on the surface catalyse-initiated radical polymerization method previously proposed by ZHOU’s research group (SCIRP, Advanced Materials, 2018, 30, 50, 1803371), the researchers used iron wire as a catalytic template to prepare an iron-based double-crosslink network with a strong, temperature-sensitive hydrogel tube containing an ATRP initiator. Then, the sub-surface that initiated a free radical polymerization method (sSI-ATRP, Science China: Chemistry, 2018, 48, 12, 1611) was adopted to graft/embed hydrophilic polyelectrolyte brush into the inner surface network of the hydrogel tube to engineer an esophagus-inspired intelligent actuator. The engineered actuator exhibited a low friction feature and temperature-dominated shrinkage-deformation behavior on the inner surface of the cavity shell. The actuator containing Fe3O4 nanoparticles exhibited local volume shrinkage upon encountering NIR irradiation, which can generate large hydrodynamic pressure and considerable mechanical extrusion force (F driving force~0.18 N) to overcome low-interface friction force (ffriction force~0.03 N). As a result, the tubular actuator can generate a mechanical peristaltic wave behavior similar to the esophagus with continuous NIR irradiation, effectively enabling on-demand transportation for constrained spherical solids. In this study, the directional transportation of constrained solids along any direction within the 3D cavity environment under harsh pressure were successfully realized by applying the novel biomimetic design concept due to the synergy between the surface modification chemistry and soft matter mechanics.
This research presents important guiding significance for understanding the coupling relationship between interface contact mechanics and friction in the process of soft material deformation under pressure. The tubular actuator is expected to be used as a biomimetic drug transport or artificial extracorporeal esophageal simulation system to help develop diet-related physical therapy plans for patients with esophageal cancer or aerospace applications.
The research was also guided by Dr. He Ximin from the University of California Los Angeles (UCLA). Dr. LIU Hui and ZHANG Yunlei from the University of the Chinese Academy of Sciences are the co-first authors of the paper.
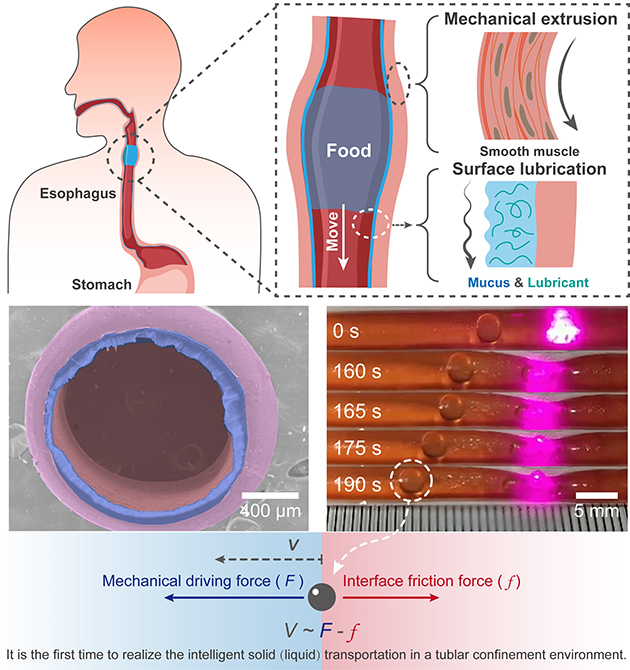
Figure 1. An esophagus-inspired directional solid transportation actuator based on the coupling effect between interfacial lubrication and mechanical deformation
This research was supported by the National Science Foundation of China, (52075522, 22032006), the Key Research Program of the Chinese Academy of Sciences (XDPB24), and the Youth Innovation Promotion Association (2019411).
Contact:
MA Shuanhong
Email: mashuanhong@licp.cas.cn
Lanzhou Institute of Chemical Physics