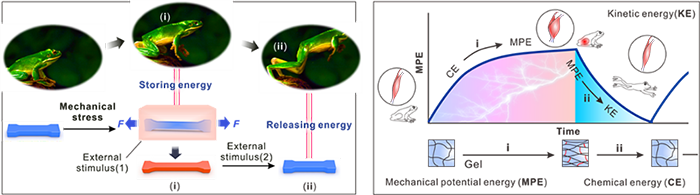
Inspired by muscle-powered acceleration in biological jumpers, scientists have designed an elastic-driven strong contractile hydrogel that works by storing and releasing elastic potential energy in a polymer network.
By reversibly forming and breaking chemical bonds in hydrogel networks, the hydrogel designed by Prof. ZHOU Feng's group from the Lanzhou Institute of Chemical Physics (LICP) of the Chinese Academy of Sciences and Prof. HE Ximin's group from the University of California, Los Angeles (UCLA) can store and release elastic energy, thus performing swift and powerful motions.
The newly designed hydrogel can generate high contractile force rapidly at ultrahigh work density, outperforming current hydrogels and even matching biological muscles.
Environment-sensitive hydrogels, also called "stimuli-responsive" or "smart" hydrogels, are attractive because they have a large degree of deformability. However, they suffer mechanical weakness or slow response when used as "artificial muscles" in actuators, robots and medical devices.
In contrast, the results of this study show that the mechanism of the current hydrogel solves the longstanding dilemma of "high speed + large force simultaneously." It is thus able to break the material energy density limit while maintaining high water content.
In addition, it enables controllable multistable deformation in a fully reversible and programmable manner, which for the first time realizes "reversible elasticity-plasticity switchability," as well as anisotropic or isotropic deformation. This universal modular material design can be broadly applied to create unlimited powerful active polymers.
"With the high-power density and programmability via this customizable modular design, these hydrogels demonstrate potential for broad applications in artificial muscles, contractile wound dressing, and high-power actuators," said Prof. ZHOU.
Results have been published online in Science Advances in an article entitled "Bioinspired high-power-density strong contractile hydrogel by programmable elastic recoil."
The work was funded by the National Natural Science Foundation of China, the Chinese Academy of Sciences, the National Key Research and Development Program of China and the National Science Foundation of the USA, among others.
https://www.eurekalert.org/pub_releases/2020-11/caos-cha111720.php